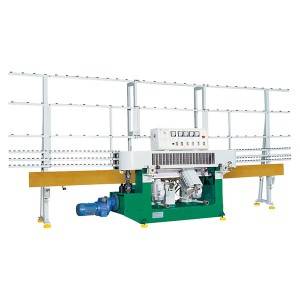


ABB မော်တာဖန်ခွက်စွန်းလွန်း polishing စက်ကိုအလိုအလျောက်ဘောလုံးကို
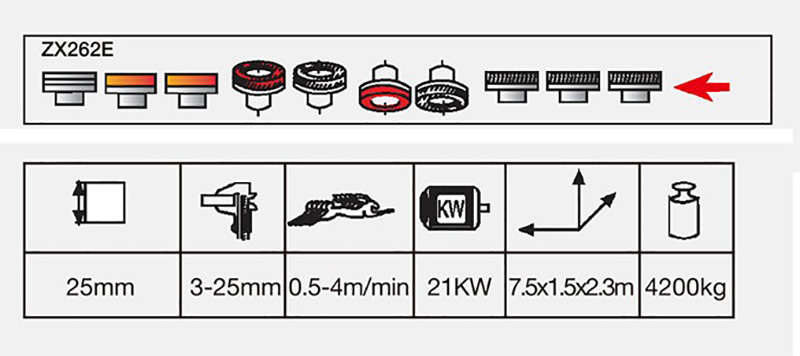
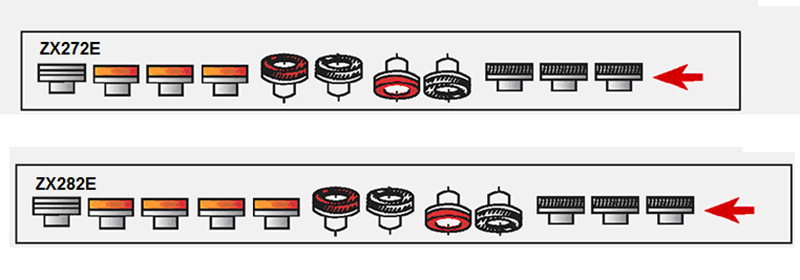
ZX262E / ZX272E / ZX282E

မစ်ဆူဘီရှီ PLC ထိန်းချုပ်မှုနှင့်ထိတွေ့မှု panel operating system


တိကျမှုမြင့်မားသောဘောလုံးအံ ၀ င်သည့်ဖွဲ့စည်းပုံ, တည်ငြိမ်သောလှုပ်ရှားမှုနှင့်ကောင်းမွန်သောရေစိုခံစွမ်းဆောင်ရည်

နောက်ကျောခံစက်တွင်သန့်ရှင်းသောဖြီးထားသောသန့်ရှင်းသောမျက်နှာပြင်ကိုထိန်းသိမ်းနိုင်ပြီးရလဒ်ကောင်းကိုရရှိစေသည်
ချောဆီအရည်ကြည်စနစ်

သံမဏိရေဖြန့်ဝေသည့်စနစ်
စက်နိဒါန်း
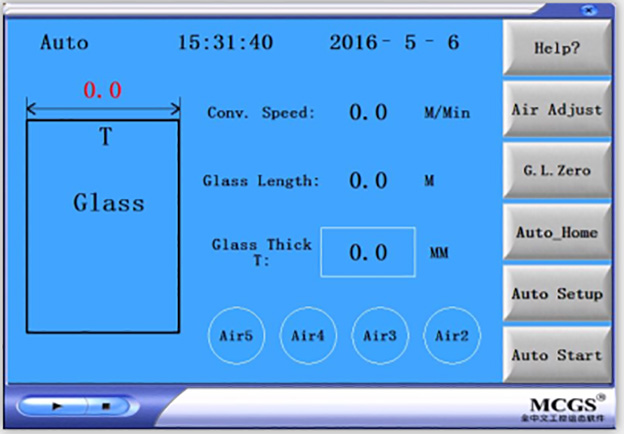
က) ထိန်းချုပ်ရေးစနစ်။
ဒီစက်ကိုသုံးပြီး PLC ထိန်းချုပ်မှုနှင့်ထိတွေ့မှု panel ကိုလည်ပတ်မှုစနစ်။ စက်သည်အလိုအလျောက်လည်ပတ်နိုင်ပြီး manual mode ဖြင့်လည်ပတ်နိုင်သည်။
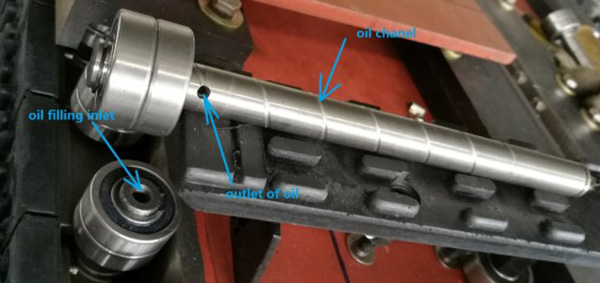
ခ) သယ်ဆောင်သူ -
Conveyor သည်သံလိုက်လှိမ့်ထုတ်လွှင့်သည့်ထုတ်လွှင့်သည့်စနစ်ကိုသုံးပြီးမြင့်မားသောတိကျသောသံမဏိလမ်းညွှန်များတလျှောက်လှိမ့်နေသောဝက်ဝံသုံးခုပါဝင်သည်။ ဖန်၏လှုပ်ရှားမှုသည်အလွန်တည်ငြိမ်သည်။
ရှေ့နှင့်နောက် conveyor အတွက် bearings ကို pump pump ဖြင့်အလိုအလျောက်ချောပေးသည်။ ကောင်းစွာဒီဇိုင်းထားသောရေနံလမ်းကြောင်းသည် top and bottom bearings ကိုဆီအညီအမျှရရှိစေသည်။
နောက်ကျောခံစက်တွင်သန့်ရှင်းသောဖြီးထားသောသန့်ရှင်းသောမျက်နှာပြင်ကိုထိန်းသိမ်းနိုင်ပြီးရလဒ်ကောင်းကိုရရှိစေသည်။
ဂ) စက်တွင်ဖန်ခွက်အထူကာကွယ်မှုယန္တရားရှိသည်။ မှားယွင်းတဲ့အထူဖန်ခွက်စက်ထဲသို့သွင်းသောအခါ။ စက်အလိုအလျှောက်ရပ်တန့်လိမ့်မည် ၎င်းသည်ဝက်ဝံများကိုကြိတ်ခွဲခြင်းမှကာကွယ်ပေးသည်။
)) ကုန်တင်စက်ကိုအချိန်ကိုက်ခါးပတ်အသုံးပြုခြင်း။ ကွဲပြားခြားနားသောဖန်ဖယ်ရှားမှုပြုလုပ်ရန်အမြင့်ကိုချိန်ညှိနိုင်သည်။
င) ဖန်သားပြင်ထောက်ခံမှုဘောင်သည်ထောင့်လေးထောင့်ကွက်နှင့်အတူ Aluminium extrusion bar ကိုသုံးသည်။
စ) ကုန်စုပ်စက်ကိုသံမဏိဖြင့်ပြုလုပ်သည်။
ဆ) ရှေ့သယ်ဆောင်လှုပ်ရှားမှုသည်စက်တပ်ယာဉ်ဖြစ်သည်။ ၎င်းကိုအလုပ်ခွင်ရှိလျှပ်စစ်ခလုတ်မှတစ်ဆင့်ချိန်ညှိနိုင်သည်သို့မဟုတ်အလိုအလျောက်ချိန်ညှိနိုင်သည်။ အထူမျက်နှာပြင်ပေါ်မှာပြသနေသည် ဖန်ခွက်အထူကိုပြရန်စက်မှုအကြပ်အတည်းလည်းရှိသည်။
ဇ) အလုပ်မြန်နှုန်းညှိခြင်း
ကြိမ်နှုန်းအင်ဗာတာမှတဆင့်အလုပ်လုပ်မြန်နှုန်းကိုချိန်ညှိနိုင်သည်။
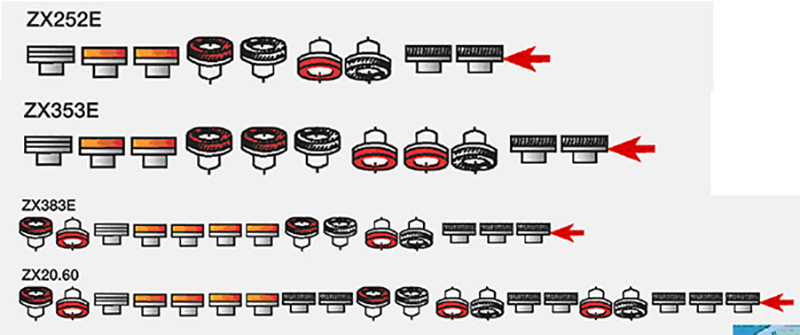
i) ဗိုင်းလိပ်တံကိုအရည်အသွေးမြင့်သော ABB မော်တာများဖြင့်မောင်းနှင်သည်။
ည) ရေစနစ်
ရေစက်နှင့်သံမဏိရေတိုင်ကီထဲတွင်ဖြန့်ဝေသည်။ ဘီးတင့်ကားမှရေကိုစီးစေရန်သံမဏိရေနုတ်မြောင်းပိုက်ကိုစက်၏နောက်ဘက်တွင်တပ်ဆင်ထားသည်။ သန့်ရှင်းသောရေတစ်စတုရန်းရေပြွန်မှတဆင့်စက်မှ pumped ဖြစ်ပါတယ်။ ရေလည်ပတ်မှုစနစ်တပ်ဆင်ရန်အလွန်လွယ်ကူသည်။
နည်းပညာဆိုင်ရာ parameters တွေကို
| ပစ္စည်း | Parameter | Range |
| 1 | ဗိုင်းလိပ်တံ: | 9 ဦး ခေါင်း။ |
| 2 | အလုပ်လုပ်နှုန်း: | 0.1m-3.8m / min |
| 3 | ကြိတ်ခြင်းအနက်: | ၃ မီလီမီတာ |
| 4 | မက်စ် arris အကျယ်: | 2.5mm |
| 5 | ဖန်ခွက်အထူ: | ၃mm မှ ၃၀ မီလီမီတာ |
| 6 | min ။ ဖန်အရွယ်: | 25mmX25mmX8mm |
| 7 | စုစုပေါင်းပါဝါ: | 19.85kw |
| 8 | ယေဘုယျ Dimension: | 8.0mx1.2mx2.0m |
| 9 | စုစုပေါင်းအလေးချိန်: | 5700kg |